by John Siau October 11, 2018


Benchmark AHB2パワーアンプとHPA4ヘッドホンアンプは、どちらもフィードフォワード補正回路を特長としています。この補正システムは、THX社の持つ特許技術THX-AAA™(アクロマティックオーディオアンプ)テクノロジーの重要なサブセットです。
これらのBenchmarkアンプが重い負荷を駆動する際に、実質的に歪みのない状態に保つシステムの1つであり、500kHzの広い帯域幅を有しながらリアクタンス負荷を駆動する際に不安定になるリスクがない理由でもあります。
フィードフォワードシステムは、クロスオーバー歪みを実質的に排除する広帯域補正信号を提供しながら、プッシュプル増幅によるクロスオーバーを介して出力ステージを駆動するのを助ける機能も果たしています。
フィードバック補正
フィードバックシステムは、オーディオアンプや、ほぼ全ての電気的システムまたは機械的システムの基本的な構成要素です。基本的な概念は、システムの出力を基準入力と比較し、出力を基準入力信号対して制御する、というものです。
言い方を変えると、フィードバックシステムは、出力を基準入力に対し制御し、リファレンス入力と出力の差を減らすものです。この基準入力と出力の差は、最小化したいエラー信号(または歪み)です。
フィードバックとフィードフォワード補正を組み合わせて使用
Benchmarkアンプは、従来のフィードバック補正と組み合わせてフィードフォワード補正を使用していることを指摘しておきます。これらの2つのシステムは、Benchmarkアンプで相互に補完し動作しています。この相互作用を理解するために、おなじみの例を見てみましょう。
クルーズコントロール:フィードバックシステム

車のクルーズコントロールは典型的なフィードバックシステムです。車速(出力)を設定した速度(基準入力)と比較して、エンジン出力を制御します。エンジン出力が増加すると速度が増加し、設定速度に達すると出力は減少します。
クルーズコントロールが適切に設計されている場合、ほぼ一定の速度を維持しながら、走行負荷(丘など)の変化に対応します。クルーズコントロールが適切に設計されていない場合、必要以上に加速してから減速する傾向が現れ、設定速度付近で速度の上げ下げが発生します。
適切に設計されたクルーズコントロールを使用しても、丘が始まると、システムがエラーを回復するまで速度がわずかに低下します。
フィードバックシステムには常に時間遅延があります。これはループ応答時間と呼ばれるものです。車重、エンジン出力、トランスミッションのギア比、速度コントロールのゲインは、すべてシステムの応答(および安定性)に影響を与えます。
フィードフォワード補正
クルーズコントロールを使用していない場合に、丘が近づいているのを視認して、より大きなエンジン出力が必要になることを予期して、アクセルを踏むことがあります。これは、丘によって車速が下がり始める前に、視覚情報によってエンジン出力を揚げる、というシステムになっていると言えます。つまり、ある意味で、フィードフォワードエラー補正を行っている、ということです。
フィードフォワード補正とフィードバック補正の組み合わせ
クルーズコントロールがオンのときにアクセルを踏んだことがあるのではないでしょうか。あなたは丘が近づいているのを視認し、一定の速度を維持するのを助けるためにアクセルを少し踏みました。クルーズコントロール(フィードバック)システムの応答時間の遅さを克服するためにアクセルを踏んだわけです。あなたの視覚情報によるフィードフォワード補正システムは、エンジン出力を適切に制御するために、クルーズコントロールシステムのフィードバックと合算されました。双方のバランスが上手く取れていれば、あなたの車は丘の始まりで減速しないでしょう。つまり、クルーズコントロール(フィードバック)が速度の低下を検出する前に、フィードフォワードがエラー補正信号を提供できた、ということです。これは、フィードバック制御システムにフィードフォワード補正を追加することの利点を示す例です。
フィードバックでは補正は入力に適用されるため、再帰的
フィードバック制御ネットワークは、システム出力をモニタリングし、システムの前段で補正信号を適用します。そのため、フィードバックネットワークは再帰的なループを形成します。補正信号がシステム出力に到達すると、出力でのエラーは減少します。残ったエラー成分は入力にフィードバックされ、出力がさらに修正されます。フィードバックシステムが適切に設計されている場合、ループを複数回通過した後、エラーはゼロになります。フィードバックシステムが適切に設計されていない場合、エラーがゼロになる代わりに、オーバーシュートまたは発振する可能性があります。
再帰的補正プロセス
再帰的補正プロセスを理解するために、クルーズコントロールの例に戻りましょう。車は丘を登り始め、速度が下がり始めます。クルーズコントロールシステムは速度の低下を感知し始めますが、フィードバックループがエンジン出力を上げる前に車は速度を失い続けます。エンジン出力が十分に増加して速度がさらに低下するのを防ぐ前に、速度が5マイル(8㎞/h)低下する場合があります。フィードバックループは、設定速度に達するまで、より多くのエンジン出力を要求し続けます。設定速度に達すると、フィードバックループがエンジン出力を下げ始めます。しかし、理想的には、設定速度を超える前に、クルーズコントロールがエンジン出力を下げるべきものです。
フィードバックループに存在する安定性の問題
一部のクルーズコントロールでは、設定速度をわずかにオーバーシュートする傾向があります。車のクルーズコントロールがオーバーシュートする傾向がある場合、低速、特にトランスミッションが低速ギアの時にこの傾向が悪化することに気付くかもしれません。先に述べたように、車重、エンジン出力、トランスミッションのギア比、速度コントロールのゲインのすべてがシステムの応答性能(および安定性)に影響を及ぼします。
この例では、最初のオーバーシュートが元の5マイルの速度低下よりも大きい場合、速度制御システムが不安定になります。そうなると、それに続くオーバーシュートまたはアンダーシュートが悪化します。クルーズコントロールを備えた1970年代のビンテージフルサイズ車を運転した時のことを覚えています。私は丘陵地帯の田舎道を時速35マイルで走行していました。クルーズコントロールシステムが発振し、ブレーキペダルを踏んでクルーズコントロールループを解除するまで、車の加速と減速繰り返しました。このおかしな、けれども潜在的に危険な挙動は、特殊な動作条件によって引き起こされました。1970年代の車のクルーズコントロールは、高速道路の速度で安定するように設計されていましたが、丘陵地帯を低速走行時に安定するようには設計されていませんでした。
オーディオアンプでは、出力負荷がフィードバックループの応答と安定性に影響を与える可能性があります。通常、容量性負荷が最も問題になります。アンプの設計者は、予想される負荷で安定性を維持するために妥協する必要があります。妥協の方法には、アンプの帯域幅を制限したり、フィードバックの使用を減らすことが含まれています。
フィードフォワードでは補正は出力に適用され、非再帰的
フィードフォワードシステムは、システムの前段部分でエラーを測定し、システムの後段部分で補正を適用します。それが真のフィードフォワードシステムである場合、補正はエラーの原因となっているステージにフィードバックされません。エラーの原因となっているステージの出力より後段に追加されます。これは、再帰性がないことを意味します。制御によるループは存在しません。フィードバックループが存在しないので、ループの安定性の問題も存在しません。システムの負荷を変更しても、システムが発振することはありません。
オーディオアンプのフィードフォワード補正
Benchmark AHB2パワーアンプとHPA4ヘッドホンアンプには、並列に動作する2つの増幅段があります。1つはメインアンプです。このアンプは、出力電力の大部分を供給します。いわば、「辛い仕事」、「重いものを持ち上げる仕事」を受け持っています。2番目の増幅段はフィードフォワード補正アンプです。このアンプは、クリーンで高速、低電力のアンプであり、「重い物を持ち上げる」メインアンプによって引き起こされた問題をクリーンアップします。補正アンプは、メインアンプによって生成された歪みをキャンセルするために出力信号に最後の仕上げを施します。このキャンセル処理は非常に高速に行われ、再帰的では全くありません。
システム負荷の変化はメインアンプによって生成される歪みの量を変化させますが、これはシステムの安定性に変化をもたらすことなく補正アンプによって除去されます。その結果、AHB2およびHPA4アンプは、リアクタンス負荷を駆動する際に安定性の問題のリスクなしに、500kHzの帯域幅をサポートできます。
さらに、フィードフォワード補正により、アンプに大きな負荷がかかっている時に出力がクリーンに保たれます。負荷がメインアンプによって生成される歪みを増加させてしまう場合は、補正アンプがそれを取り除きます。その結果、Benchmarkアンプによって生成されるTHDは負荷によって増加しません。無負荷時のTHDは負荷がある場合のTHDと一致します。これは、以下のプロットに示されています。
高負荷時でもTHDが増加しない
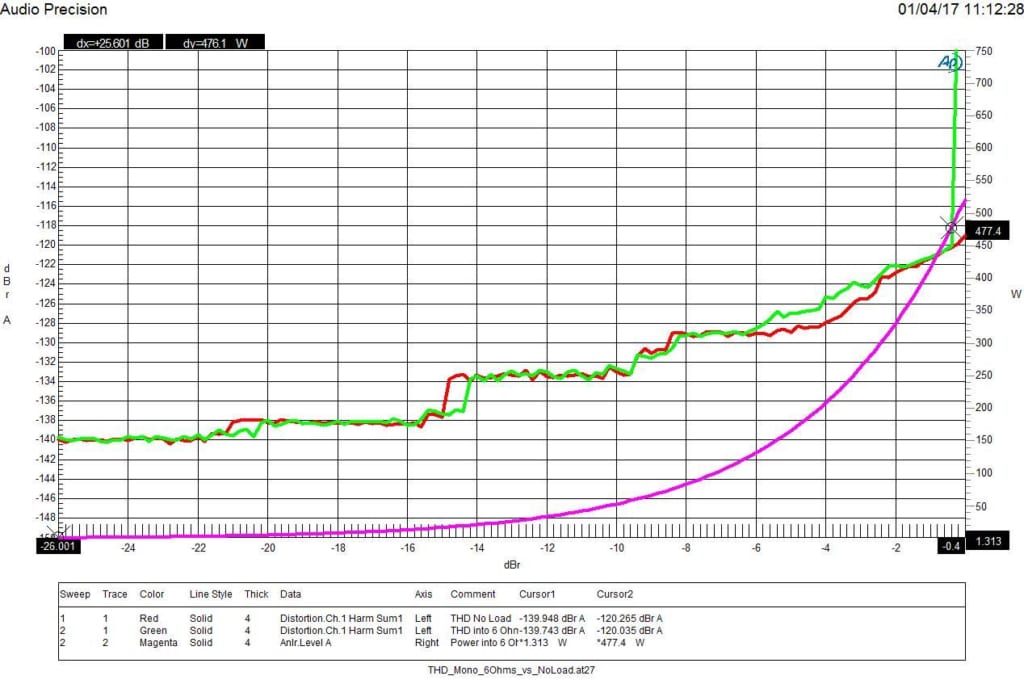
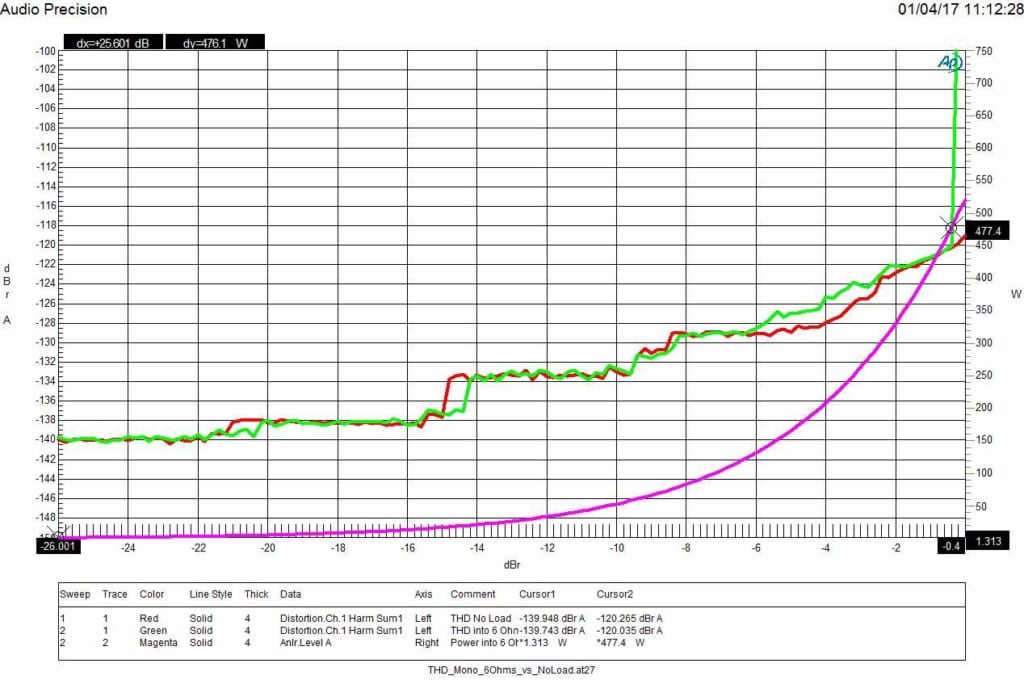
以下のグラフは、無負荷および6オーム負荷時のAHB2パワーアンプで発生する1 kHzでのTHDを示しています。これはモノラルモードで動作時のものですが、ステレオモードで3Ω負荷を両チャンネル同時に駆動するのと同じ状況です。THDは、この重い負荷の有無にかかわらず、実質的に同じであることに注目してください。この負荷変化に対する耐性は、フィードフォワードシステムの有効性を示しています。また、THDが477W(6Ω負荷)で-わずか120dB(0.0001%)に過ぎないことに注目してください。フィードフォワード補正アンプによって提供される追加の「クリーンアップ」には、実際に効果があるということが判るでしょう。
従来のパワーアンプで同様のプロットを測定すると、負荷インピーダンスが減少するにつれてTHDが大幅に増加することがわかります。従来のアンプは、8Ωを駆動する場合よりも4Ωを駆動する場合の方が歪みは大きくなります。従来のアンプは、モノブロック設定で動作させると、より多くの歪みが発生します。
以下のグラフに見られる階段状のステップは、オーディオアナライザーAP2722の測定限界によるものです。この階段状ステップの存在は、アンプで発生したTHDがアナライザー内で発生する微小な残留THDに非常に近いことを示しています。
クリーンな「ファーストワット(最初の1w)」性能
マゼンタ色のプロットは、1.3Wからクリッピングが始まる477Wまでスイープしたときの出力を示しています。1.3Wの赤と緑の曲線は、THDがアンプのピーク出力を140dB下回っていることを示しています。AHB2は、ほとんどのリスニング状況で使用される「最初の1W」で並外れたパフォーマンスを発揮します。
この低出力時の性能がいかにクリーンなものであるかは、AHB2を従来型クラスABアンプと比較した次のオシロスコープ写真から確認することができます。
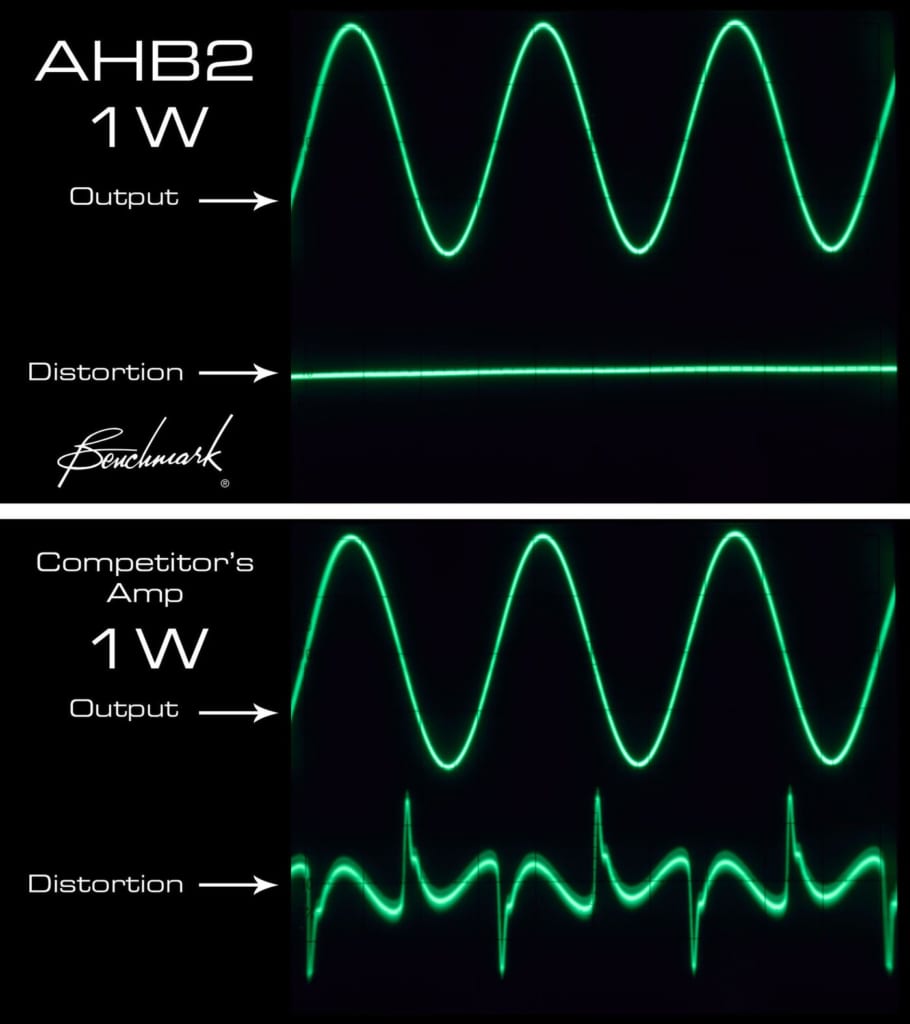
従来のアンプで発生する歪みのほとんど(写真右)は、アンプの出力段周辺の従来方式のフィードバックネットワークで完全に除去できなかったプッシュプル・クロスオーバー過渡歪みによるものです。
どちらのアンプでも、歪み波形は60dB増幅されていて、耳が捉えるものを視認することができます。また、上記の2つのアンプを比較するために、ABX音質評価テストで、この歪み成分を聴き取ることができるかを確認しました。
プッシュプル出力段
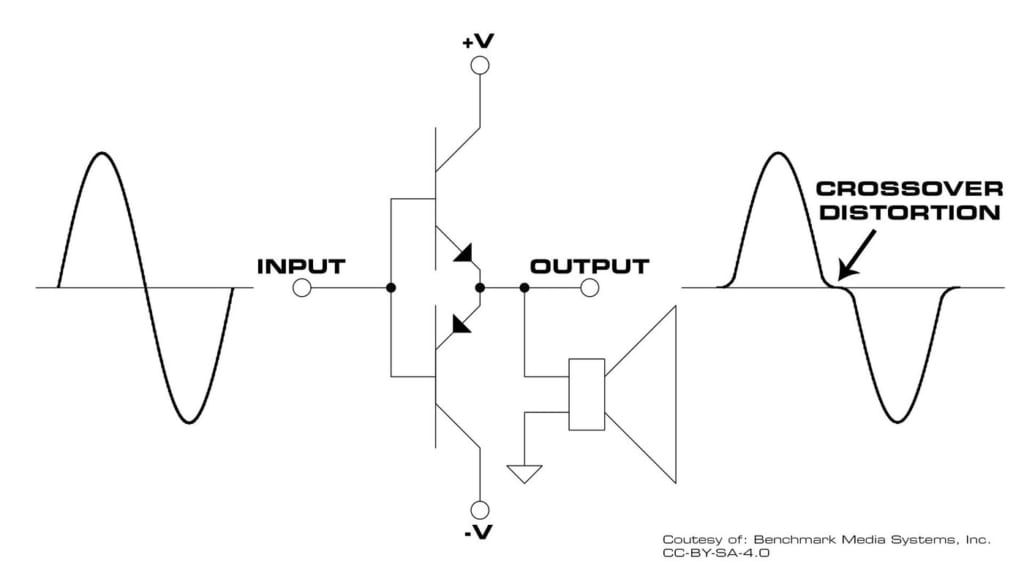
クラスABアンプは、コンンプリメンタリ(相互補完)型トランジスタを使用して、出力をハイ側に「プッシュ(押し上げ)」し、ロー側に「プル(引き下げ)」します。下記の簡略化したダイアグラムは、クラスBの出力ステージを図示したものです。
クラスAB増幅では、プッシュ動作とプル動作にクロスオーバーを介して移行している間、両方のデバイスをオンしたままにするバイアスネットワークが追加されています。しかし、右下図は、両方のデバイスが同時にオフになるデッドゾーンが存在するために生じる深刻な歪みが発生する可能性を示しています。このデッドゾーンは、クラスBアンプに見られる特性で、それがゆえにクラスB増幅ほとんど使用されることはありませんが、クラスAB増幅でのプッシュモードとプルモードのクロスオーバーで歪みが発生する理由を示すのに役立つため、ここに含まれています。
前述のオシロスコープ写真に見られる歪みは、クラスB出力ステージによって生成される歪みよりもはるかに小さいですが、従来型クラスABアンプで発生する歪みは右側の写真ではっきりと確認することができます。
プッシュプル・クロスオーバー歪
従来型アンプでは、フィードバックエラー補正を最小限に抑えるために、出力段の設計に細心の注意を払う必要があります。プッシュプル・クロスオーバー領域のバイアス動作は重要であり、出力デバイスは慎重にマッチングさせる必要があります。プッシュプルスイッチング動作による過渡現象は、出力段のフィードバックループの帯域幅を超える周波数成分を発生することがよくあります。帯域幅を超えた成分を含む過渡歪みはフィードバックシステムによって除去することができません。
変動するスピーカー負荷と温度変化により、正確なバイアス動作とデバイスのマッチングが混乱し、負荷インピーダンスが低下するにつれて歪みが増加を引き起こします。前述したように、この特性は、8Ω負荷時のTHDと4Ω負荷時のTHDを比較すると明らかです。
フィードフォワード補正はクロスオーバー歪を除去可能
Benchmark製アンプでは、フィードフォワード増幅段には、メインアンプ増幅段によって生成される過渡歪みを補正するのに十分な帯域幅があります。そのため、高負荷や温度変化の下でも出力がクリーンに保つことができます。メインアンプ増幅段のバイアスは、システム全体のパフォーマンスにとってさほど重要ではありません。バイアスエラーは、補正アンプの動作量を少し大きくするだけです。出力信号のクリーンアップを行うのにそれほどパワーを必要とせず、補正アンプは追加されたバイアスエラーを処理するだけです。フィードフォワード補正増幅段は、負荷や温度の変化が発生したときにシステムの自己修正を行います。

まとめ
フィードバックシステムは、ほとんどのオーディオ機器で重要な部分となっています。フィードバックを使用することで、アンプで発生する歪みを減らすことができます。しかし、フィードバックは再帰的処理であるため、安定性の問題が発生する可能性があり、フィードバックループで応答に遅延が発生します。そのため、補正を開始する前に、何らかのエラーが発生してしまいます。
一方、フィードフォワード補正は、フィードバックシステムを置き換えるか、あるいは補足することができるものです。フィードフォワード補正は非再帰的であるため、本質的に安定しています。フィードフォワード補正は、出力負荷が変化しても安定して動作が可能で、かつ効果的です。
Benchmark製アンプは、フィードバック補正とフィードフォワード補正を組み合わせて使用しています。フィードフォワード補正増幅段は、アンプの最終出力に補正信号を追加するもので、パワーアンプの高出力増幅段の性能を補正する場合に特に役立っています。
Benchmark製アンプは、フィードフォワード補正を使用することで最終的な広帯域での補正を実現し、メインアンプ段によって生成される歪みを補正します。この補正は、小さな補助アンプ段によって適用されます。メインアンプ段と補助アンプ段はパッシブ的に合算されて最終出力になります。
この複合システムを採用することで、歪みが非常に少ないアンプを実現しています。すべての負荷条件の下でこの低歪みを維持し、重い負荷を駆動するときでも安定性を維持することができます。無負荷時のTHD特性と全負荷時のTHD特性はほぼ一致しており、この複合型補正システムの有効性を証明しています。
フィードフォワード補正搭載ヘッドホンアンプ HPA4

フィードフォワード補正搭載パワーアンプ AHB2
